



Lokalizacja źródeł dźwięku z wykorzystaniem kamer akustycznych – od teorii do praktyki
Współczesne kamery akustyczne stanowią jedno z najpotężniejszych narzędzi w dziedzinie pomiarów dźwięku i analizy akustycznej. Dzięki połączeniu wielokanałowych matryc mikrofonowych z zaawansowanymi algorytmami beamformingu pozwalają wizualizować rozkład źródeł dźwięku w przestrzeni, nawet w złożonych środowiskach akustycznych. Technologia ta znajduje zastosowanie w akustyce przemysłowej, diagnostyce maszyn, badaniach środowiskowych, inżynierii hałasu komunikacyjnego, a także w nowoczesnych systemach monitoringu i bezpieczeństwa akustycznego.
Zasada działania – beamforming akustyczny
Podstawą działania kamery akustycznej jest metoda beamformingu, polegająca na obliczeniowym „skupianiu” kierunkowości matrycy mikrofonów w celu określenia miejsca, z którego pochodzi dźwięk.
Każdy mikrofon rejestruje ten sam sygnał z różnym opóźnieniem czasowym. Analizując te różnice, oprogramowanie rekonstruuje mapę ciśnienia akustycznego w badanej scenie. Wynik prezentowany jest w postaci mapy kolorystycznej (sound map), nakładanej na obraz wideo.
Rozdzielczość przestrzenna zależy od liczby mikrofonów, ich rozmieszczenia i średnicy całej matrycy. Im większa średnica, tym lepsza separacja źródeł i zdolność analizy niskich częstotliwości.
W akustyce pojęcie to opisuje tzw. „beamwidth” – szerokość głównej wiązki kierunkowej układu mikrofonowego, czyli obszaru, z którego system rejestruje sygnał z najwyższą czułością.
Jak opisuje Jacobsen (DTU, 2017, Introduction to Acoustic Beamforming), szerokość wiązki (beamwidth) jest wprost proporcjonalna do długości fali dźwięku i odwrotnie proporcjonalna do średnicy matrycy. Oznacza to, że im większa matryca, tym węższa wiązka i lepsza rozdzielczość kierunkowa – co wyznacza podstawowy kompromis między mobilnością a precyzją systemu.
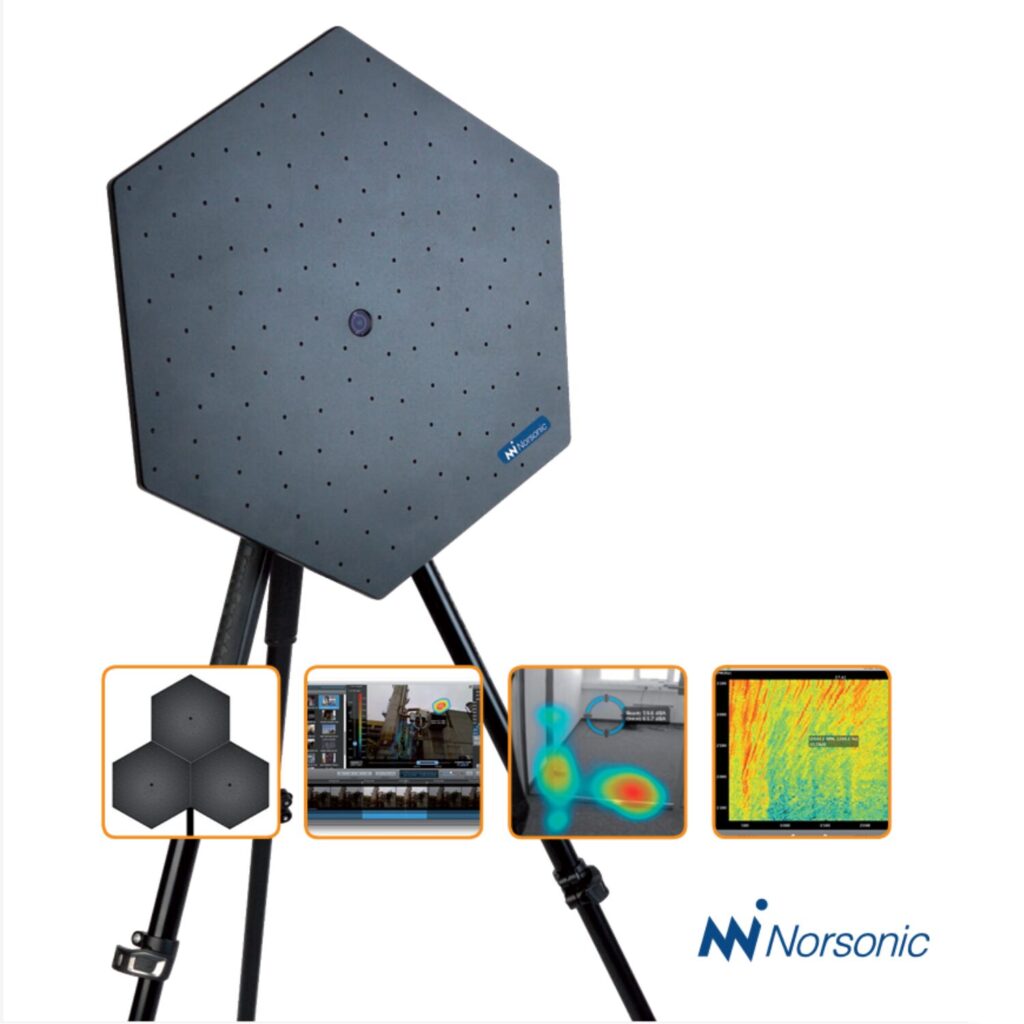
Jednym z najbardziej zaawansowanych przykładów takiego systemu jest kamera akustyczna Norsonic Nor848B, dostępna w trzech konfiguracjach, różniących się wielkością, zakresem częstotliwości i liczbą mikrofonów:
-
Hextile – pojedynczy moduł zawierający 128 mikrofonów MEMS, pracujący w zakresie 410–20000 Hz, o średnicy 46 cm i masie poniżej 3 kg. To kompaktowe rozwiązanie do mobilnych pomiarów i analiz w średnim oraz wysokim zakresie częstotliwości.
-
Multitile – zestaw trzech połączonych modułów (łącznie 384 mikrofony), o średnicy 96 cm i masie poniżej 10 kg, rozszerzający dolną granicę pomiarową do 220 Hz. Większa średnica matrycy oznacza wyższą rozdzielczość i zdolność rozróżniania źródeł położonych blisko siebie, zwłaszcza przy dźwiękach o niższej częstotliwości.
-
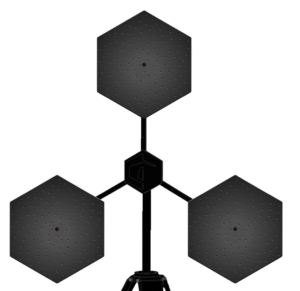
Multitile (LF mode) – konfiguracja rozproszona, w której trzy moduły są rozmieszczone szerzej, tworząc matrycę o średnicy 146 cm i tym samym 384 mikrofonach. Umożliwia pracę w zakresie 120–1000 Hz, czyli w paśmie niskich częstotliwości, istotnym przy analizie dużych źródeł hałasu, rezonansów konstrukcyjnych czy dźwięków tonalnych.
W skrócie: im większa średnica matrycy, tym lepsza rozdzielczość przestrzenna i możliwość pracy w niższych częstotliwościach, przy czym rośnie także masa całego systemu.
Zależność między wielkością matrycy a zakresem częstotliwości
Zakres częstotliwości, w jakim może pracować kamera akustyczna, jest bezpośrednio powiązany z wymiarami matrycy mikrofonowej oraz odległością między jej skrajnymi mikrofonami. Wynika to z długości fali dźwięku – im niższa częstotliwość, tym dłuższa fala, a więc tym większa odległość mikrofonów niezbędna jest do jej poprawnej analizy.
Przy niskich częstotliwościach (np. 200 Hz, gdzie długość fali wynosi ok. 1,7 m w powietrzu) mała matryca o średnicy kilkudziesięciu centymetrów nie jest w stanie jednoznacznie określić kierunku źródła dźwięku, ponieważ wszystkie mikrofony rejestrują niemal identyczny sygnał.
Z kolei przy wysokich częstotliwościach (np. 5 kHz, długość fali ok. 7 cm) zbyt duża odległość między mikrofonami może prowadzić do aliasingu przestrzennego, czyli błędnego odwzorowania kierunku.
W przypadku systemu Norsonic Nor848B użytkownik nie musi wybierać między różnymi modelami – ponieważ wersje MultiTile i MultiTile-LF wykorzystują te same trzy moduły Hextile, które można rozmieszczać w różnych konfiguracjach.
Dostarczany w zestawie statyw systemowy umożliwia szybkie przestawienie modułów:
-
w układzie skupionym (MultiTile) – dla pomiarów o wysokiej rozdzielczości w pełnym zakresie do 20 kHz,
-
lub w układzie rozsuniętym (MultiTile-LF) – do analiz niskoczęstotliwościowych już od 120 Hz.
Dzięki temu użytkownik otrzymuje jedną, uniwersalną kamerę akustyczną, którą można dostosować do dowolnego typu pomiaru w szerokim zakresie częstotliwości.
Geometria matrycy i charakterystyki kierunkowe
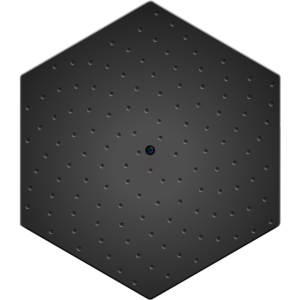
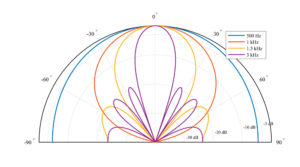
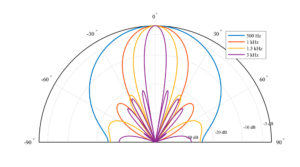
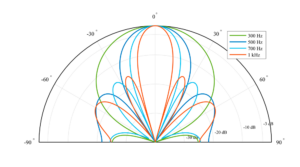
Poniżej przedstawiono układy matryc i charakterystyki beampattern dla trzech konfiguracji kamery.
Na wykresach widać, że zwiększenie średnicy układu powoduje wyraźne zawężenie wiązki kierunkowej (beam), co przekłada się na większą precyzję lokalizacji i możliwość pracy z dźwiękami o niższych częstotliwościach.
1.Układ matrycy mikrofonowej i charakterystyka kierunkowa dla konfiguracji Hextile.
2. Układ matrycy mikrofonowej i charakterystyka kierunkowa dla konfiguracji Multitile.
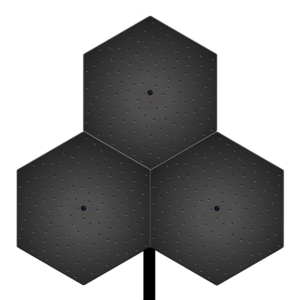
3. Układ matrycy mikrofonowej i charakterystyka kierunkowa dla konfiguracji Multitile w trybie niskoczęstotliwościowym (LF mode).
Wpływ rozmiaru matrycy na rozdzielczość przestrzenną
Poniższy przykład pokazuje, jak zmiana geometrii matrycy mikrofonowej wpływa na rozdzielczość przestrzenną przy częstotliwości 500 Hz.
Na górze zestawienia przedstawiono trzy konfiguracje matryc: pojedynczą Hextile z 128 mikrofonami, Multitile z 384 mikrofonami oraz Multitile (LF mode) z tym samym układem mikrofonów, ale szerzej rozmieszczonych.
Dla pojedynczej matrycy Hextile widoczny jest szeroki płat główny (main lobe) charakterystyki kierunkowej, co oznacza niższą rozdzielczość i mniejszą zdolność do precyzyjnego rozróżniania źródeł przy niskich częstotliwościach.
W miarę zwiększania średnicy matrycy — w konfiguracjach Multitile i Multitile (LF mode) — płat główny staje się coraz węższy, co przekłada się na lepszą dokładność lokalizacji, większą separację sygnałów oraz możliwość pracy z dźwiękami o niższych częstotliwościach.
Na poniższej ilustracji widać wyraźnie, że wzrost rozmiaru matrycy prowadzi do istotnej poprawy rozdzielczości oraz precyzyjniejszego wskazania położenia źródła dźwięku.
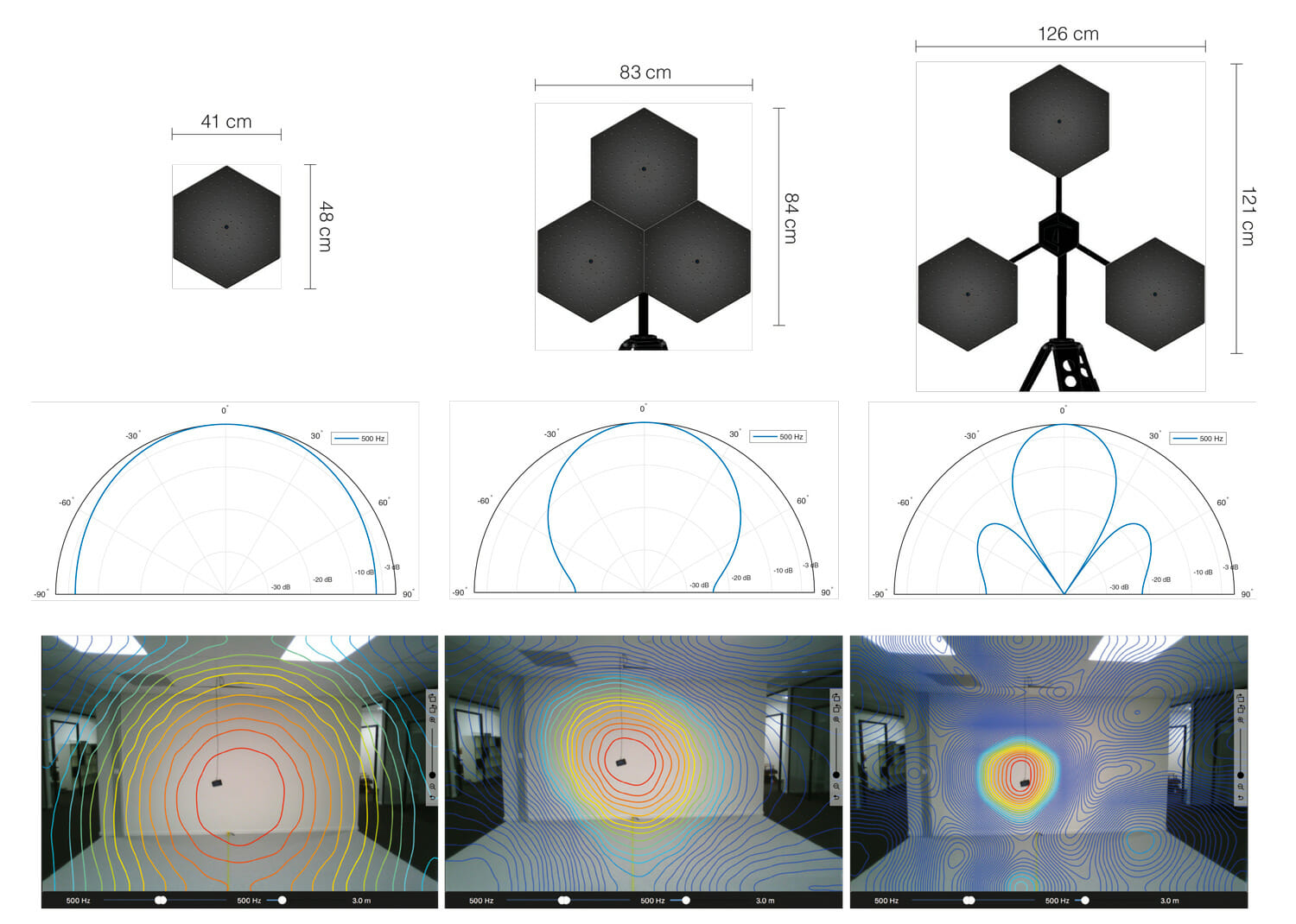
To zjawisko potwierdzają również prace empiryczne (Ramos & Bjorno, Applied Acoustics, 2019), wskazujące, że podwojenie średnicy matrycy skutkuje dwukrotnym zwiększeniem zdolności rozdzielczej w zakresie niskich częstotliwości.
Oprogramowanie i funkcje analizy
Oprogramowanie kamery Nor848B zostało zaprojektowane z myślą o intuicyjnej obsłudze i analizie w czasie rzeczywistym.
Wyróżniają je m.in.:
-
Wirtualny mikrofon – umożliwia odsłuch dźwięków z wybranego kierunku, przy jednoczesnym tłumieniu pozostałych,
-
Gumka akustyczna (acoustic eraser) – pozwala eliminować z analizy zakłócające źródła hałasu,
-
Analiza rzędów (Order Analysis) – umożliwia wizualizację zależności częstotliwości od prędkości obrotowej (RPM),
-
Post-processing – analiza zapisanych danych z możliwością zmiany parametrów (pasma, czasu, kierunku).
Dzięki tym narzędziom kamera akustyczna staje się nie tylko urządzeniem pomiarowym, ale również kompletnym środowiskiem analitycznym, pozwalającym badać zjawiska akustyczne z wysoką precyzją.
Zastosowania praktyczne
Modularna budowa Nor848B sprawia, że system może być wykorzystywany zarówno w laboratoriach badawczych, jak i w terenie.
Przykładowe obszary zastosowań obejmują:
-
lokalizację źródeł hałasu przemysłowego,
-
analizę usterek maszyn i elementów mechanicznych,
-
badania akustyki budowlanej i przecieków,
-
testy elementów lotniczych i pojazdów,
-
oraz zastosowania specjalne, takie jak monitorowanie ruchu i detekcja dronów.
Dzięki pracy w zakresie od 120 Hz w trybie LF i rozdzielczości kątowej rzędu kilku stopni, system pozwala na skuteczną analizę źródeł dźwięku o bardzo niskich częstotliwościach, nawet w otwartym środowisku.
Podsumowanie
Kamera akustyczna Norsonic Nor848B stanowi przykład, jak precyzyjna inżynieria akustyczna i nowoczesne techniki beamformingu mogą przenieść analizę hałasu na zupełnie nowy poziom.
Dzięki elastycznej konstrukcji, intuicyjnemu oprogramowaniu i imponującej dokładności, system znajduje zastosowanie wszędzie tam, gdzie liczy się szybka, wizualna i precyzyjna lokalizacja źródeł dźwięku – od laboratoriów R&D po pomiary terenowe i zastosowania przemysłowe.
Literatura:
-
Norsonic AS, Nor848B Acoustic Camera – Product Documentation, 2024
-
Jacobsen, F. (2017). Introduction to Acoustic Beamforming. Technical University of Denmark (DTU).
-
Ramos, P., & Bjorno, L. (2019). Resolution improvements in acoustic beamforming arrays. Applied Acoustics, 150, 80–91.

